▼ 2015/11/23(月) 2015シーズン
【ハーフマウス】
B3 Kishimotoです。
前回の更新からすでに半年が経ってしまいました。
今年作ったマウスの情報です

実を言うとこの基板は2枚目です。
1枚目では調子に乗って1005サイズのチップ部品を選択しましたが、マイコンに書き込みできないという状態になりました。
パッドサイズが小さすぎたためのハンダ不良と思われます。
2枚目では1608サイズのパッドに1005部品をハンダ付けしています。
また、1枚目では足回りの設計を攻めすぎてダメでした。
3Dプリントしたギア付きホイールに基板で作ったモータマウントという組み合わせで設計してみましたが、実際に組んでみるとまともにギアが噛み合いませんでした。
手元で気軽に作り直せないマウントではバックラッシュの修正もままならず、2枚目ではジュラコン製のモータマウント+市販ギアという組み合わせになりました。
他にも、
マイコンを64ピンから48ピンへ(配線は楽になったがフルカラーLEDは諦めた)
ベアリングを片持ちから両持ちへ(車軸のブレがなくなった)
基板のミスを修正(レギュレータのOUTとINが逆だった)
という修正を行いました。
こんな調子で金沢草の根大会の時点ではハードが完成しておらず、7月終わりに2枚目を発注。
ちまちま部品を実装しては動作確認、の繰り返しで9月の中旬ごろにハードが完成。
それからは関西大会で完走することを目標にモータの制御を頑張ってましたが、磁気式エンコーダの値がブレるという有名?な現象が出ました。
やはりΦ2という小さい経の磁石を使っているとさらに厳密な軸合わせが必要らしく、自分の設計ではエンコーダ基板を手ハンダで固定するというものだったので、軸が合っていないのでしょう。
もしくは、磁石をベアリングに圧入する際に叩きまくったから磁気が乱れているかもしれません。
いろいろ先輩にアドバイスを頂いて、関西大会の前日の夜までに直進とスラロームができる状態まで仕上げ、BKCのホテル(別名精神と時の部屋)で去年のマウスから探索関数と最短関数を移植する作業を行い、なんとか探索、最短を完走しました。(直線関数にバグが残っており、直線スピードを上げると遅くなるという状況でしたが)
次の中部地区大会では全面探索の成功を目標に探索の安定化を図りました。
路面の違いによる影響をもろに受け、スラロームが安定せず、試走会ではさんざんな結果でしたが、その後のA:Mac部室で行った徹夜デバッグのおかげで1回目はコケましたが2回目で全面探索に成功しました。
その後は全日本に向けさらなる探索の安定化と斜め走行の実装を行い、全日本大会に挑みました。
全日本大会は試走日から参加。
制御がクソなので、全日本の床にスラロームパラメータを合わせこむというあまりよろしくないことを行ってました。
また、自分の斜め対応最短導出は1区画ゴールに対応してないため、探索のゴール時にゴール区画を1区画奥にするというアルゴリズムを入れたりしました。
本番では
1走目
走り始めから直進でブレがあり、事前に試走台で取ったセンサ値があてにならないことを知り、ショックを受ける。全面探索途中で壁の読み間違いでコケる。
2走目
斜めなしの最短をするもゴール座標をずらすアルゴリズムのバグでゴール区画の隣にゴール。
3走目
斜め最短ならゴールできるかもと思い走らせてみるも読み間違えた部分を通り無事死亡。
4走目
もう一度探索。全面探索成功するも終了地点で謎のフェイルセーフが発動し帰ってこない。
5走目
最低パラメータの斜めで壁にぶつかりながらも最短成功。7秒008。
こんな感じでなんとかサークルにフレッシュマンとはいえ、全日本1位の記録を持って帰ることができました。
表彰式後には連日の徹夜のせいか緊張のせいか体調を崩し、サークルのみんなに迷惑をかけながら帰宅。
1日寝たら治りました。
最後に、東京工芸大の鈴木先生はじめ、大会運営スタッフの皆様、ありがとうございました。
前回の更新からすでに半年が経ってしまいました。
今年作ったマウスの情報です
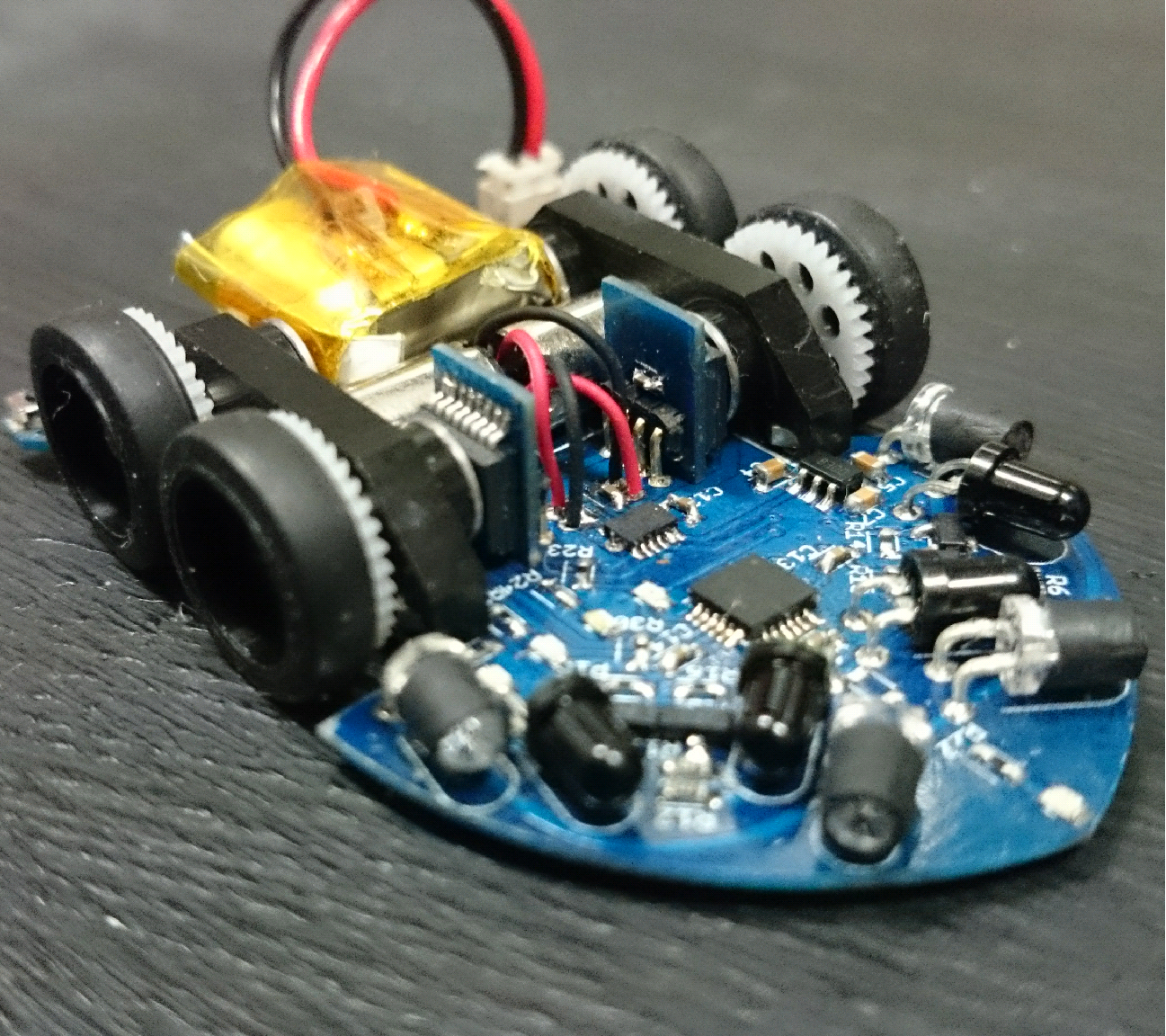
| 名前 | Lark |
| サイズ | 57*38*12.7mm |
| 重量 | 15.3g |
| マイコン | RX631 |
| モータ | MK06-4.5 |
| ジャイロ | MPU6000 |
| センサ | OSI5FU3A11C + LTR-4206E |
| エンコーダ | AS5145 |
| バッテリ | Lipo 1cell 70mAh |
1枚目では調子に乗って1005サイズのチップ部品を選択しましたが、マイコンに書き込みできないという状態になりました。
パッドサイズが小さすぎたためのハンダ不良と思われます。
2枚目では1608サイズのパッドに1005部品をハンダ付けしています。
また、1枚目では足回りの設計を攻めすぎてダメでした。
3Dプリントしたギア付きホイールに基板で作ったモータマウントという組み合わせで設計してみましたが、実際に組んでみるとまともにギアが噛み合いませんでした。
手元で気軽に作り直せないマウントではバックラッシュの修正もままならず、2枚目ではジュラコン製のモータマウント+市販ギアという組み合わせになりました。
他にも、
マイコンを64ピンから48ピンへ(配線は楽になったがフルカラーLEDは諦めた)
ベアリングを片持ちから両持ちへ(車軸のブレがなくなった)
基板のミスを修正(レギュレータのOUTとINが逆だった)
という修正を行いました。
こんな調子で金沢草の根大会の時点ではハードが完成しておらず、7月終わりに2枚目を発注。
ちまちま部品を実装しては動作確認、の繰り返しで9月の中旬ごろにハードが完成。
それからは関西大会で完走することを目標にモータの制御を頑張ってましたが、磁気式エンコーダの値がブレるという有名?な現象が出ました。
やはりΦ2という小さい経の磁石を使っているとさらに厳密な軸合わせが必要らしく、自分の設計ではエンコーダ基板を手ハンダで固定するというものだったので、軸が合っていないのでしょう。
もしくは、磁石をベアリングに圧入する際に叩きまくったから磁気が乱れているかもしれません。
いろいろ先輩にアドバイスを頂いて、関西大会の前日の夜までに直進とスラロームができる状態まで仕上げ、BKCのホテル(別名精神と時の部屋)で去年のマウスから探索関数と最短関数を移植する作業を行い、なんとか探索、最短を完走しました。(直線関数にバグが残っており、直線スピードを上げると遅くなるという状況でしたが)
次の中部地区大会では全面探索の成功を目標に探索の安定化を図りました。
路面の違いによる影響をもろに受け、スラロームが安定せず、試走会ではさんざんな結果でしたが、その後のA:Mac部室で行った徹夜デバッグのおかげで1回目はコケましたが2回目で全面探索に成功しました。
その後は全日本に向けさらなる探索の安定化と斜め走行の実装を行い、全日本大会に挑みました。
全日本大会は試走日から参加。
制御がクソなので、全日本の床にスラロームパラメータを合わせこむというあまりよろしくないことを行ってました。
また、自分の斜め対応最短導出は1区画ゴールに対応してないため、探索のゴール時にゴール区画を1区画奥にするというアルゴリズムを入れたりしました。
本番では
1走目
走り始めから直進でブレがあり、事前に試走台で取ったセンサ値があてにならないことを知り、ショックを受ける。全面探索途中で壁の読み間違いでコケる。
2走目
斜めなしの最短をするもゴール座標をずらすアルゴリズムのバグでゴール区画の隣にゴール。
3走目
斜め最短ならゴールできるかもと思い走らせてみるも読み間違えた部分を通り無事死亡。
4走目
もう一度探索。全面探索成功するも終了地点で謎のフェイルセーフが発動し帰ってこない。
5走目
最低パラメータの斜めで壁にぶつかりながらも最短成功。7秒008。
こんな感じでなんとかサークルにフレッシュマンとはいえ、全日本1位の記録を持って帰ることができました。
表彰式後には連日の徹夜のせいか緊張のせいか体調を崩し、サークルのみんなに迷惑をかけながら帰宅。
1日寝たら治りました。
最後に、東京工芸大の鈴木先生はじめ、大会運営スタッフの皆様、ありがとうございました。
▼ コメント(0件)
- TB-URL http://www.usamimi.info/~isys/cgi-bin/adiary/adiary.cgi/mouse/0159/tb/