【ロボトレース】
B3 Takayanagiです。
熱田の森大会、ライントレース部門に参加させてもらいました。
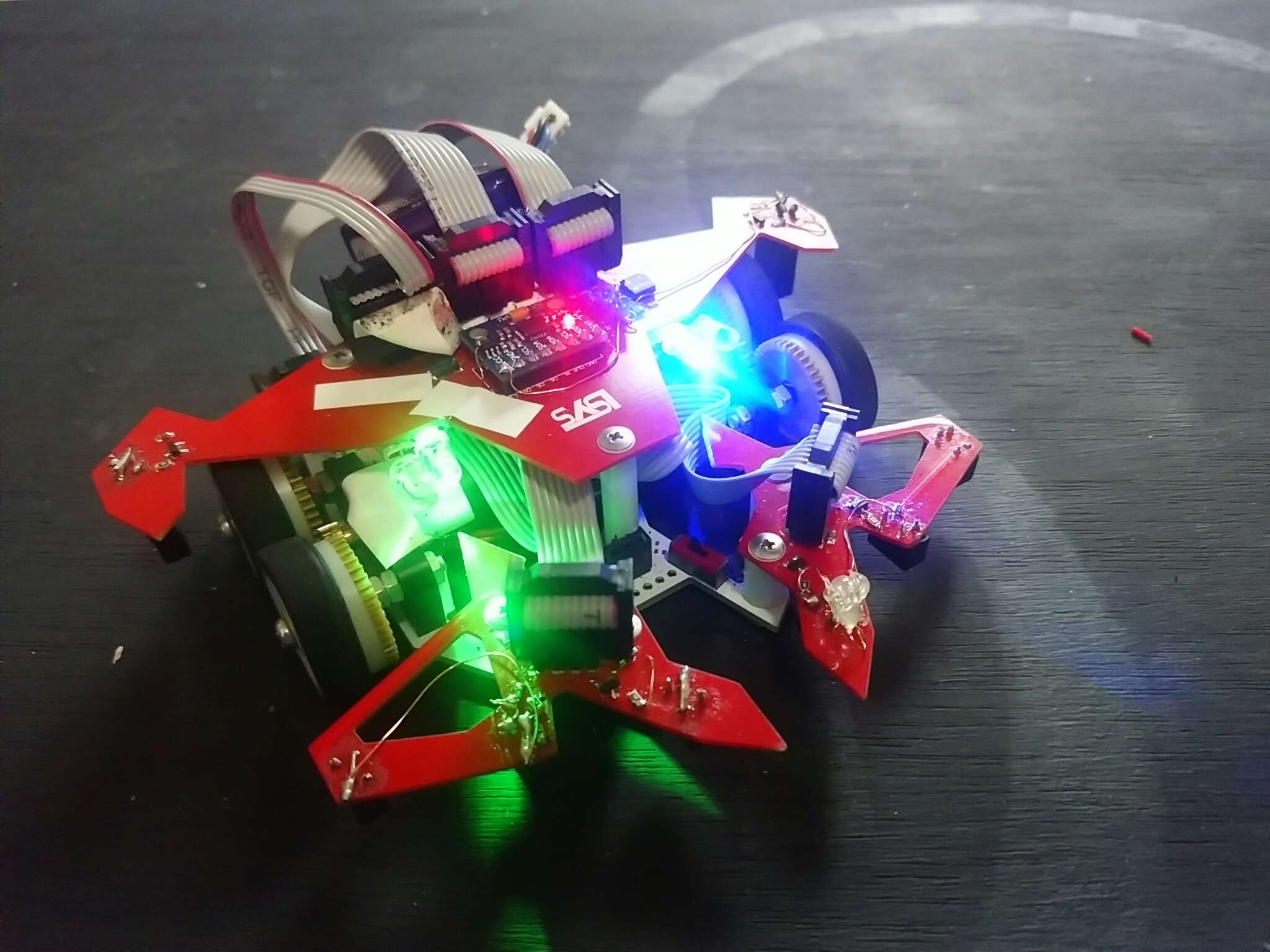
この大会用に、T.T 壱式という、ちょっとふざけたデザインをしたトレーサーを作りました。
読み方は、「高柳トレーサーいちしき」です。
さて、今作は、トレーサー一作目(厳密には2作目)だったので、多くの失敗点を出してしまいました。
書いていきます。
・MPU6500及び、レベル変換ICのはんだ付け失敗
・センサ位置
・重さ
・重心
まあ、中には、失敗というか、凝ったデザインのおかげでなってしまったというところもあります。
後日、追々細かく書いていきます。
熱田の森大会、ライントレース部門に参加させてもらいました。
この大会用に、T.T 壱式という、ちょっとふざけたデザインをしたトレーサーを作りました。
読み方は、「高柳トレーサーいちしき」です。
さて、今作は、トレーサー一作目(厳密には2作目)だったので、多くの失敗点を出してしまいました。
書いていきます。
・MPU6500及び、レベル変換ICのはんだ付け失敗
・センサ位置
・重さ
・重心
まあ、中には、失敗というか、凝ったデザインのおかげでなってしまったというところもあります。
後日、追々細かく書いていきます。