【ロボトレース】
B3 Takayanagiです。
熱田の森大会に参加してきました!
結果は……
トレース……2走目(加減速走行)が走らず、惨敗
スプリント……3位
スプリントは一回戦目でフェールセーフが働かないというバグに気付けて、
二回戦目以降閾値を下げる修正を行うことができて運がよかった。
機体の状態が最近よくないので、新作に取り掛からないとまずい。
新作はT.Tシリーズの第二世代となります。今までとは考え方の異なる走行をさせたいと思います。
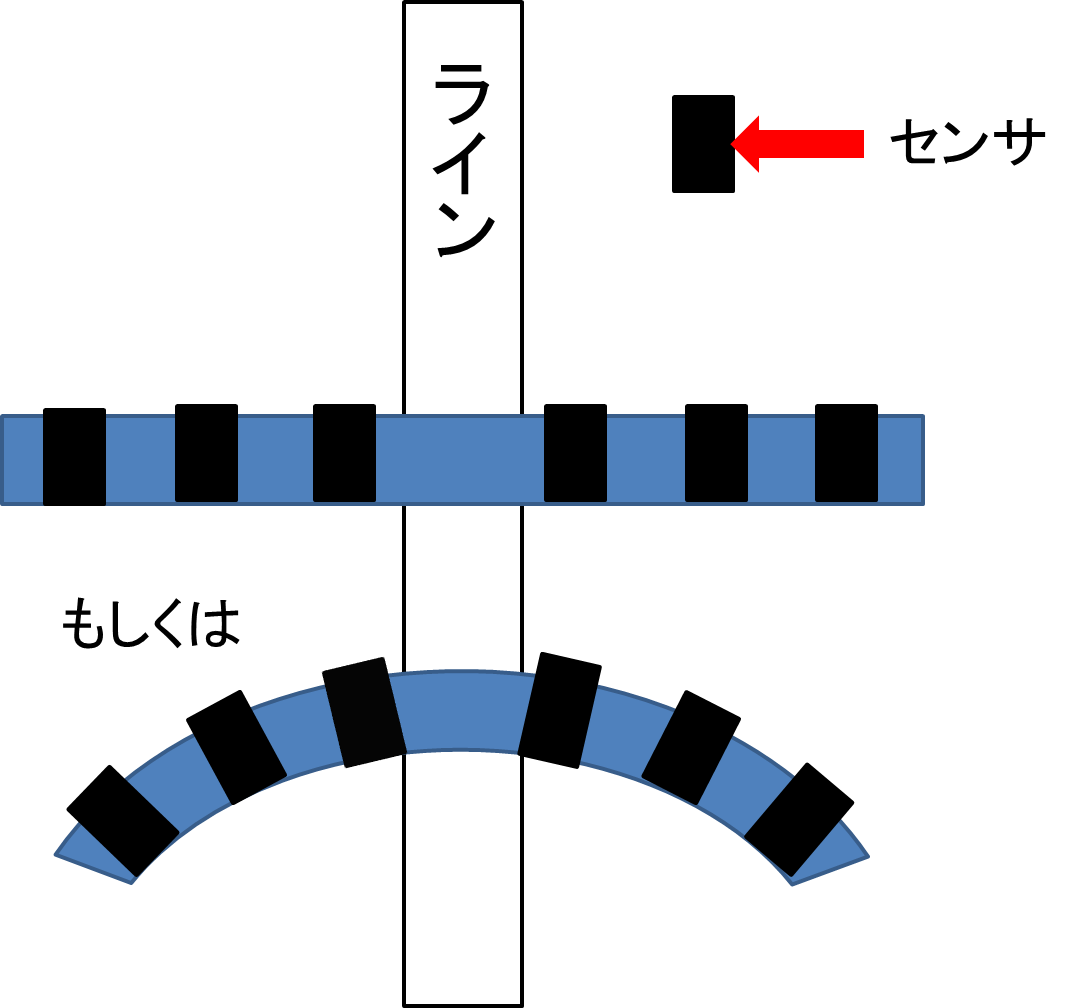
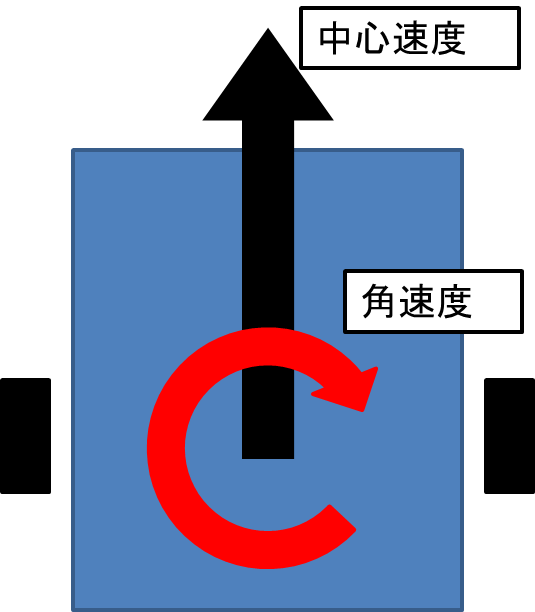
今までの走行方法は、センサ値からの機体目標値の設定を少しオーバーに与えて、
追従遅れを含めた曲がり方で強引に曲がっていたのですが、今度の新作は、センサ
位置を曲がり方に都合のよい入力が入ってくるように設定したいと思っています。
追従遅れを発生させてしまうと、カーヴ → 直線の加速時にどうしてもぶれてしまうことがわかりました。
次回作の目標は、直線加速時に発振しないような制御をすることです。
それでは。
熱田の森大会に参加してきました!
結果は……
トレース……2走目(加減速走行)が走らず、惨敗
スプリント……3位
スプリントは一回戦目でフェールセーフが働かないというバグに気付けて、
二回戦目以降閾値を下げる修正を行うことができて運がよかった。
機体の状態が最近よくないので、新作に取り掛からないとまずい。
新作はT.Tシリーズの第二世代となります。今までとは考え方の異なる走行をさせたいと思います。
今までの走行方法は、センサ値からの機体目標値の設定を少しオーバーに与えて、
追従遅れを含めた曲がり方で強引に曲がっていたのですが、今度の新作は、センサ
位置を曲がり方に都合のよい入力が入ってくるように設定したいと思っています。
追従遅れを発生させてしまうと、カーヴ → 直線の加速時にどうしてもぶれてしまうことがわかりました。
次回作の目標は、直線加速時に発振しないような制御をすることです。
それでは。